|
|
Faculté des Sciences
Appliquées |
Projet 2
Version 1 du 10.10.2011 |
|
Mécanique
Rationnelle 2ème bachelier
2011-2012 |
Pendule avec
Ressort |
|

Comment procéder pour télécharger
et utiliser la démo ?
Version compilée avec Matlab2004 et qui fonctionne
sous Windows XP (testé le 10-10-2011)
-
Télécharger et installer MCRInstaller.exe qui contient des
librairies (si Matlab est déjà installé,exécutez le MCRInstaller.exe qui est livré avec Matlab)
-
Télécharger projet2gui.exe
-
Télécharger projet2gui.ctf (si votre browser force
l’extension .zip, transformez-la en .ctf)
Les fichiers projet1gui.exe et projet1guide.ctf
doivent se trouver dans un même répertoire.
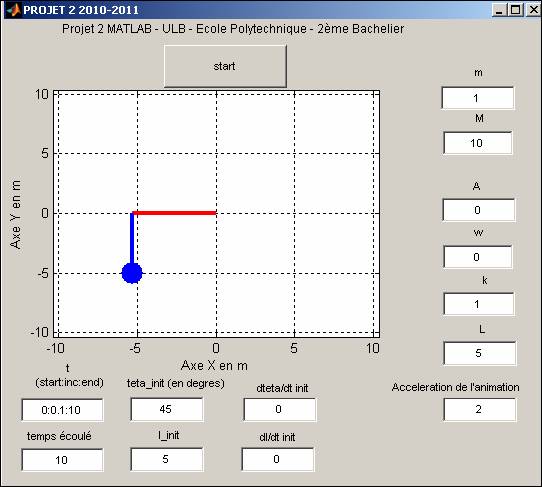
Ci-après une copie écran de l’exécutable en
question.
Pour tout souci : cfao.matlab@ulb.ac.be
|
1. |
Un pendule est constitué d’une masse
ponctuelle m à l’extrémité d’une barre sans masse de longueur l. L’autre
extrémité de cette barre estattachée à une masse ponctuelle M qui peut se
mouvoir horizontalement et qui est solidaire d’une ressort de longueur nulle
au repos et de constante de rappel k. Ce ressort peut s’étendre
indifféremment dans les deux sens. L’extérmité du ressort non solidaire de la
masse M peut avoir un mouvement imposé A.sin(wt) On demande 1.
d’écrire les équations du mouvement en fonction des
paramètres m, M, k, A et w 2.
d’écrire la valeur de l’energie du système. Est-elle
constante ? 3.
d’étudier avec Matlab le mouvement en faisant varier
les paramètres m, M, k en considérant A =0 4.
d’étudier avec Matlab le mouvement en faisant varier
les paramètres m, M, k en considérant A
différent de 0
|
Cas : k = 1;l=5 ;x(0)
= 5; dx/dt(0)=0 ;m = 1;M = 10;w = 0;A = 0 ; q (0)=45° ;dq/dt(0)=0 ;
|
Pour ceux qui le souhaitent, voici une
tactique parmi d’autres pour progresser dans le projet : Vous verrez - lors des séminaires matlab - 4
outils : l’évolution de la solution (position et vitesse) en fonction du
temps, le plan des phases (la vitesse en fonction de la position), la section
de Poincaré depuis le plan des phases (la vitesse en fonction de la position
échantillonnée), et le diagramme des bifurcations. Commencez par l’évolution en fonction du temps pour
voir si le mouvement vous semble périodique ou en transition vers le chaos
(doublement, triplement de période). Utilisez le critère (condition
nécessaire) de sensibilité aux conditions pour confirmer/infirmer votre
intuition. Le plan des phases vous permet aussi d’y voir clair et même de
trouver d’autres phénomènes à côté du chaos. Un mouvement périodique sera une
courbe fermée (différente selon la condition initiale). Un cycle limite (un
mouvement stationnaire de type régime) sera une courbe vers laquelle la
trajectoire tendra toujours quelle que soit la condition initiale. Si
l’équation ne dépend pas du temps, la courbe ne se coupera jamais dans le
plan des phases. Toujours dans le cas où il n’y a pas de dépendance explicite
par rapport au temps, quelle que soit la condition initiale, la courbe dans
la plan des phases correspondante à une condition initiale ne coupera jamais
une autre courbe correspondant à une autre condition initiale. Vous pensez avoir trouvé des valeurs de paramètre qui
donnent un mouvement chaotique ? Confirmez avec une section de Poincaré
en jouant sur la période d’échantillonnage pour améliorer l’esthétique de la
section de Poincaré (qui doit être, dans le cas d’un mouvement chaotique, une
courbe fractale). Dans une zone à chaos,
certaines conditions initiales peuvent donner lieu à un mouvement
chaotique, d’autres pas. Si vous superposez les sections de Poincaré
correspondantes à ces conditions initiales, vous verrez immédiatement la
différence. Quand vous avez suffisamment balayé les valeurs des
paramètres, résumez le tout sur un diagramme de bifurcations qui peut être
vue comme une projection sur l’axe y de la section de Poincaré pour
différentes valeurs du paramètres. En conclusion,
utilisez donc les 4 outils suivants : : Outil n°1 : Evolution en fonction du temps est un
grahe (t, x(t))) ou dx/dt(t)) Outil n°2 : Plan des phases est un graphe :
(x(t), dx(t)/dt Outil n°3 : Section de Poincaré est un
graphe : : (x(T), dx(T)/dt où, par exemple,T=2.p/w Outil n°4:
Diagramme de bifurcation : (A.w2, x(T)) Comme votre projet est à deux ddl, vous
pouvez limiter l’utilisation des outils à un seul de ces degrés de liberté.
Les deux degrés de liberté étant couplé, ce que vous trouverez en terme de
section de Poincaré, plan des phases, diagramme de bifurcation sur un des
degrés de liberté vaudra pour l’autre (du moins qualititivement). Ceci dit, il se peut que vous soyez dans une
configuration des paramètres et une modélisation qui ne donne pas de chaos.
Dans ce cas, convainquez le lecteur que vous avez tout essayé pour le
trouver. Vous êtes perdu devant la quantité de
paramètres à tester ? Utilisez votre fibre ingénieur ! Commencez par
tester les valeurs des paramètres dont vous pouvez dire que vous y avez le
plus facilement accès. S’il est question dans votre projet d’un mouvement
forcé, on peut considérer qu’il s’agit d’un moteur pour lequel vous pouvez
facilement modifier A ou la vitesse angulaire w. Ensuite tester les valeurs de k en prenant des valeurs
réalistes. Un ressort que vous pouvez presser à la main fait k=quelques
centaines de N/m. Un ressort que vous devez comprimer avec tout le poids de
votre corps fait quelques milliers de N/m. Testez donc ces fenêtres (ne
négligeant pas non plus des valeurs plus petites ou plus grandes). Enfin, testez si l’amortissement change les conclusions
que vous aurez trouvées. |
Depuis le 10.10.2011, vous êtes le visiteur n° :
40